SESSION INSIGHT
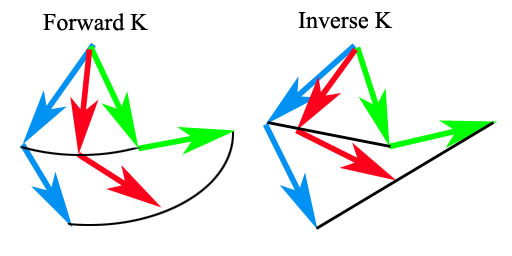
We will be looking at the process of making relationships between different objects and even human/animal structures. Parenting really relies on a planned order of assigned hierarchies. Hierarchies use the “inverted tree” model, where the parent (the hip or pelvis) is referred to as the “root.” While no part of a hierarchy is ever really referred to as the “trunk,” the children, and their children, become “branches.” Upon proper designation of parents and children, an animator can begin to make some fairly realistic movements based on a process known as kinematics. There are two kinds: Forward kinematics and Inverse kinematics. If you want to move a character’s hand under a basic hierarchy, you would first rotate the upper arm, then the forearm, and finally the hand itself until the entire limb is in place. This “top-down” system of rotation is called Forward Kinematics, and it’s great for basic animation. Animation seems simple with Forward Kinematics and basic hierarchies-until your character has to do something like walk without her feet sliding across the floor, or stay in place while turning her body to look behind her. In those cases, you have two choices, neither of which is aesthetically pleasing:
Rotate the entire hierarchy (making the feet slide uselessly).
Rotate only the top of the hierarchy (the hip) leaving the other pieces behind (very painful to watch).
 At that point, Forward Kinematics (and your character) falls apart. Planting a walking character’s foot is almost impossible, because the single most difficult thing for an object at the bottom of a hierarchy to do is to stay in one place while the objects above it move. The illusion of stability actually takes constant readjustment.
At that point, Forward Kinematics (and your character) falls apart. Planting a walking character’s foot is almost impossible, because the single most difficult thing for an object at the bottom of a hierarchy to do is to stay in one place while the objects above it move. The illusion of stability actually takes constant readjustment.
Inverse kinematics is important to game programming and 3D animation, where it is used to connect game characters physically to the world, such as feet landing firmly on top of terrain.
An animated figure is modeled with a skeleton of rigid segments connected with joints, called a kinematic chain. The kinematics equations of the figure define the relationship between the joint angles of the figure and its pose or configuration. The forward kinematic animation problem uses the kinematics equations to determine the pose given the joint angles. The inverse kinematics problem computes the joint angles for a desired pose of the figure.
One method to constrain an animation of human or animal figures is to use a jointed skeletons. The skeleton is made up of a set of links. Each link in the chain is rigid, and the movement is constrained by the degree of freedom at each joint. The skeleton can be fleshed out in any way to create the animated figure. There is considerable interest among designers and animators in studying the movement of jointed chains. Normally the links of the articulated chain are taken as rigid, and the joints are constrained by the degrees of freedom they support.
Please read this article by Cassandra Ward on why anatomy is critical for animators. (Click here if the article does not load below.)
This session’s tutorials will cover parenting, but will include advanced imports, working with .psd files and the first steps to animating characters.
Parenting Animal
The files used in this session’s tutorials are located below. Please grab them so you can follow along!
